«ПРОГРАММИРУЕМЫЙ КОЛЁСНЫЙ РОБОТ»

Описание экспоната
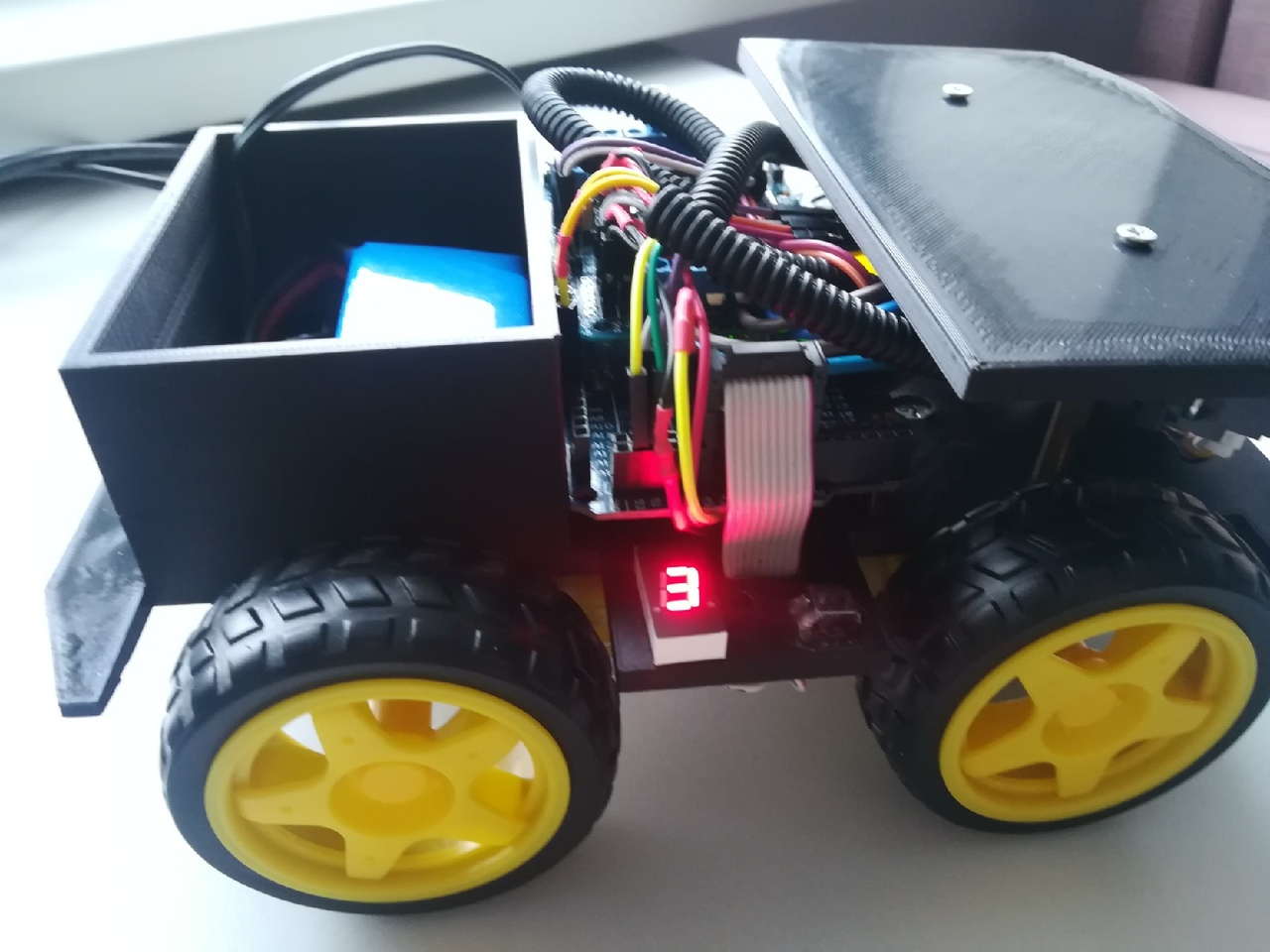
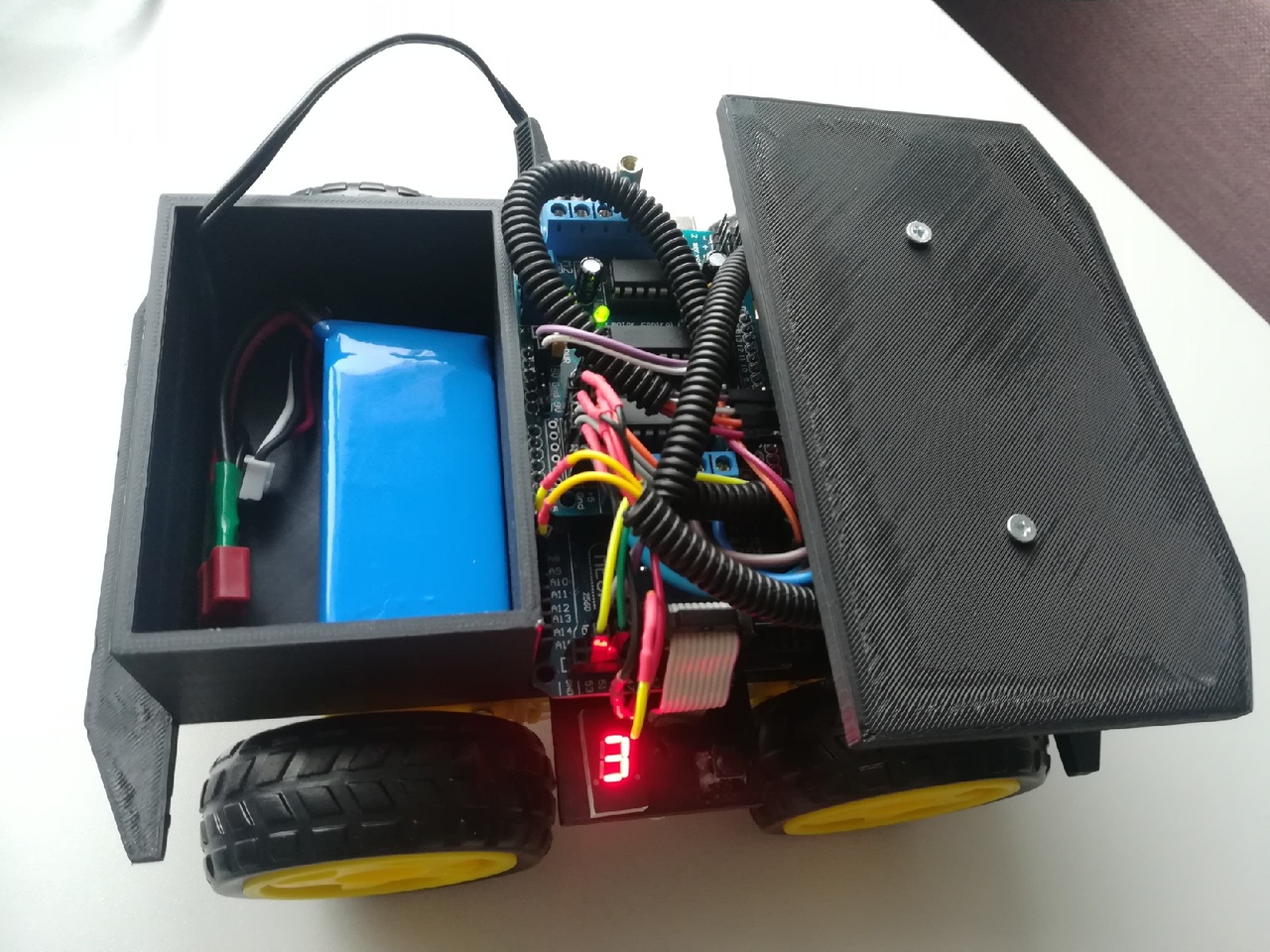
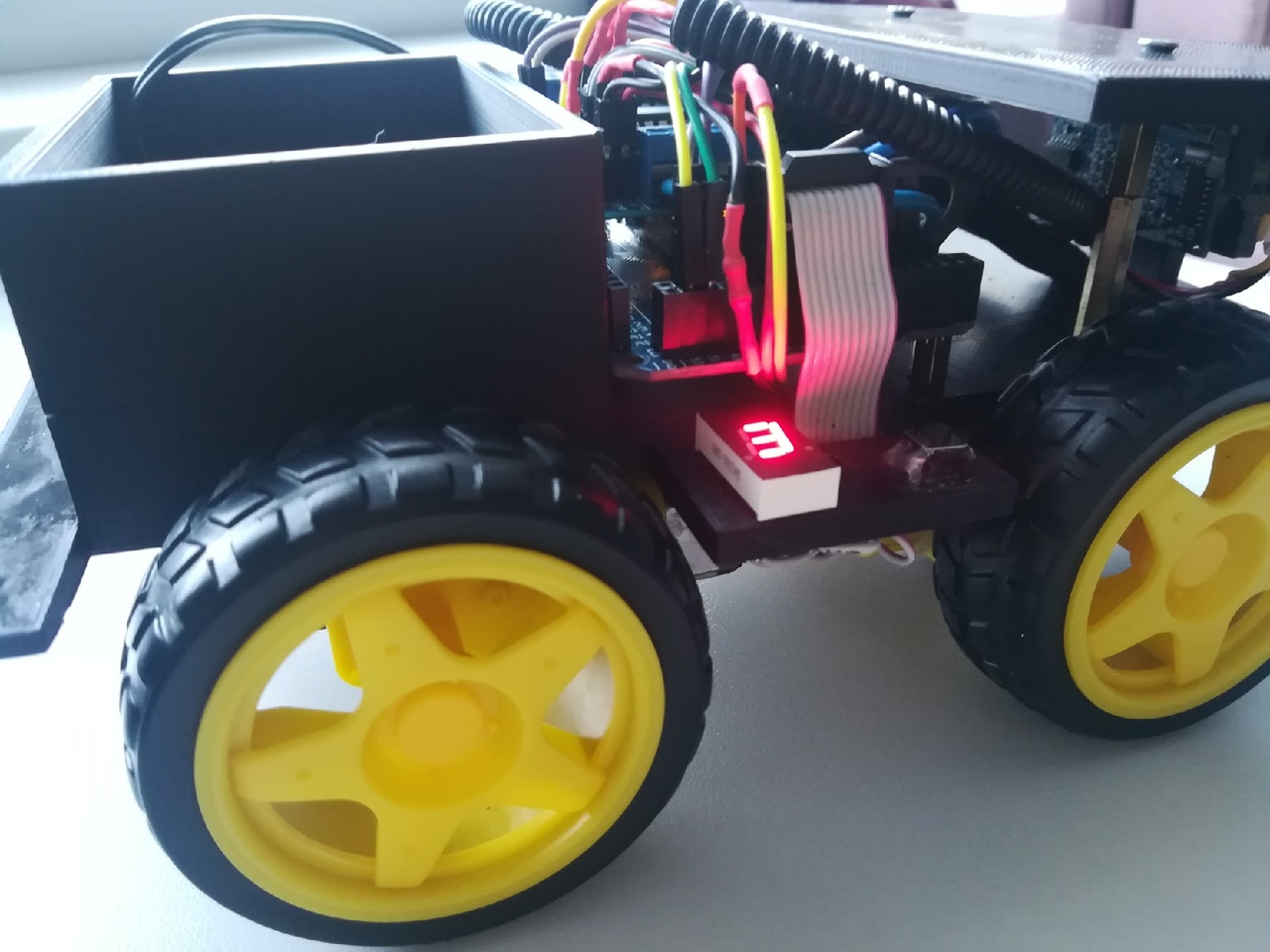
Разработка является действующей моделью колесного робота, управляемого контроллером Arduino Mega 2560. В основе ходовой части робота включены 4 редукторных двигателя постоянного тока, каждый из которых программируется независимо. Контроллер запрограммирован на 3 режима работы робота: 1) движение по линии; 2) ориентирование в пространстве с помощью ультразвукового и инфракрасных датчиков расстояния; 3) управление с мобильного телефона через bluetooth. Выбор режимов работы производится тактовой кнопкой, отображение выбранного режима – с помощью семисегментного индикатора. Питание робота осуществляется от аккумулятора. Шасси робота смоделировано в среде 3D Studio MAX и изготовлено посредством технологии 3d-печати.
Характеристики экспоната
Тип: робототехнические и интеллектуальные системы.
Назначение: демонстрация модели колесного робота, управляемого контроллером Arduino Mega 2560.
Технические характеристики: габариты: масса: 0,5 кг, размеры: (21/14/10) см.
Область применения: в образовании для изучения основ программирования контроллеров Arduino.
Год создания: 2019
Стоимость: 200.00 BYN
Автор: Шадурский А.В., инженер-программист учебного вычислительного центра УО ПГЭК, педагог дополнительного образования.